技術資料傳動鏈條鏈條選擇
選定所需的計算公式
公式中使用的符號和單位
| 符號 | 說明 | SI單位 | {重力單位} |
|---|---|---|---|
| αb | 負載減速 | m/s2 | m/s2 |
| αs | 負載加速度 | m/s2 | m/s2 |
| C | 軸間距離以鏈節數表示 | - | - |
| C′ | 機長 | m | m |
| d | 減速機輸出軸鏈輪的節距圓直徑 | mm | mm |
| d1 | 小鏈輪的節距圓直徑 | mm | mm |
| d2 | 大鏈輪節節距圓直徑 | mm | mm |
| D | 滾筒外徑 | mm | mm |
| Fb | 減速時鏈張力 | kN | kgf |
| F'b | 減速時的修正鏈張力 | kN | kgf |
| FC | 轉向架驅動的鏈條張力 | kN | kgf |
| F'C | 轉向架驅動的補償鏈張力 | kN | kgf |
| Fℓ | 負荷 (實際負荷) 側扭矩引起的鏈條張力 | kN | kgf |
| F'ℓ | 負荷 (實際負荷) 側扭矩引起的修正鏈張力 | kN | kgf |
| Fm | 發動機額定輸出功率 (kW) 引起的鏈條張力 | kN | kgf |
| F'm | 來自原動機側的修正鏈張力 | kN | kgf |
| Fms | 發動機起動扭矩引起的鏈條張力 | kN | kgf |
| F'ms | 發動機起動扭矩引起的補償鏈張力 | kN | kgf |
| Fmb | 發動機制動扭矩引起的鏈條張力 | kN | kgf |
| F'mb | 發動機制動扭矩引起的補償鏈張力 | kN | kgf |
| FS | 加速時的鏈張力 | kN | kgf |
| F'S | 加速時的修正鏈張力 | kN | kgf |
| FW | 由載荷 (實際載荷) 引起的鏈張力 | kN | kgf |
| F'W | 來自載荷 (實際載荷) 的修正鏈張力 | kN | kgf |
| f1 | 滾子與導軌的摩擦係數 (有潤滑0.14無潤滑0.21) | - | - |
| G | 標準重力加速度G=9.80665m/S 2 | - | - |
| i | 速比 (例) 若為1/30則i=30 | - | - |
| Iℓ{GD2ℓ} | 負載的原動機軸轉換慣性矩 | kg・m2 | kgf・m2 |
| Im{GD2m} | 原動機軸慣性矩 | kg・m2 | kgf・m2 |
| K | 衝擊係數 | - | - |
| Kn | 旋轉係數 | - | - |
| Ks | 使用係數 | - | - |
| Ku | 不平衡負載係數 | - | - |
| Kv | 銷齒速度係數 | - | - |
| Kz | 齒數係數 | - | - |
| L | 鏈長度 (鏈節數) | - | - |
| m | 鏈的單位質量{重量} | kg/m | kgf/m |
| M{W} | 負載質量{重量} | kg | kgf |
| n | 求鏈速度時小鏈輪的旋轉速度 | r/min | rpm |
| n1 | 原動機軸轉速 | r/min | rpm |
| n2 | 負載軸的旋轉速度 (從動軸的旋轉速度) | r/min | rpm |
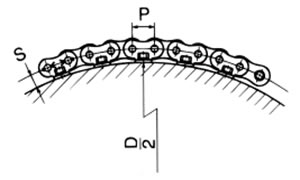
| P | 鏈節距 | mm | mm |
| R | 慣性比 | - | - |
| S | RS附件鏈的附件高度(滾筒安裝面到鏈節距與中心的距離) | mm | mm |
| tb | 減速時間 | s | s |
| tS | 加速時間 | s | s |
| Tb | 發動機制動扭矩 | %(kN・m) | %(kgf・m) |
| Tmax | 發動機的最大 (停止) 扭矩 | %(kN・m) | %(kgf・m) |
| TS | 發動機起動轉矩 | %(kN・m) | %(kgf・m) |
| Tℓ | 負載轉矩 | kN・m | kgf・m |
| Tm | 作用轉矩 | kN・m | kgf・m |
| Tn | 發動機的額定扭矩 | kN・m | kgf・m |
| V | 鏈速 | m/min | m/min |
| Vℓ | 負載速度 | m/min | m/min |
| Z | 大鏈輪齒數 | - | - |
| Z′ | 小鏈輪齒數 | - | - |
| ω | 原動機軸角速度 | rad/min | rad/min |
| ωb | 原動機軸角減速 | rad/s2 | rad/s2 |
| ωS | 原動機軸角加速度 | rad/s2 | rad/s2 |
計算公式
- 1.包括鏈條在內的傳輸效率η=1,進行所有選擇。
- 2.選定時使用的張力和傳動kW請使用表13項、14項中計算的值。
| 條目 | SI單位 | {重力單位} |
|---|---|---|
|
1.鏈條長度 (鏈節數) :L |
兩軸卷繞傳動時
|
|
|
銷齒傳動 |
使用纏繞在滾筒外側的附件鏈條時 L = 180° tan-1 P D + 2S
|
|
|
2.鏈速度:V |
V = P × Z' × n 1000 (m/min) |
|
|
3.發動機額定輸出功率 (kW),額定轉速下的鏈條張力:Fm |
Fm = 60 × kW V (kN) |
Fm = 6120 × kW V (kgf) |
|
4.將負荷的慣性力矩I (GD 2) 換算為 |
Iℓ = M × V 2πn1 2 (kg・m2) |
GD2ℓ = W × V πn1 2 (kgf・m2) |
|
5.發動機的額定扭矩:Tn |
Tn = 9.55 × kW n1 (kN・m) |
Tn = 974 × kW n1 (kgf・m) |
|
6.作用扭矩:Tm |
Tm=
Ts (%) +T max (%)
2×100
×Tn (kN・m) |
Tm=
Ts (%) +T max (%)
2×100
×Tn (kgf・m) |
|
7.起動扭矩引起的鏈張力:Fms |
Fms=
Ts (%) ×i
{d/ (2×1000) }×100
×Tn×1 (kN) |
Fms=
Ts (%) ×i
{d/ (2×1000) }×100
×Tn×1 (kgf) |
|
制動扭矩引起的鏈張力:Fms |
Fmb=
T b (%) ×i
{d/ (2×1000) }×100
×Tn×1.2* (kN) *是常數 |
Fmb=
T b (%) ×i
{d/ (2×1000) }×100
×Tn×1.2* (kgf) *是常數 |
8.加速時間:ts |
ts = (Im + Iℓ) × n1 9550 × (Tm - Tℓ) (s) |
ts = (GD2m + GD2ℓ) × n1 375 × (Tm - Tℓ) (s) |
9.減速時間:t b ±:懸掛負荷等負負荷時為 |
tb = (Im + Iℓ) × n1 9550 × (Tb ± Tℓ) (s) |
tb = (GD2m + GD2ℓ) × n1 375 × (Tb ± Tℓ) (s) |
10.加速度
假設直線加速。 否則,請以最大加速度計算。 |
直線運動 (負荷加速度) αs= V l ts×60 旋轉運動 (原動機軸角速度) ω=2 π ×n1 旋轉運動 (原動機軸角加速度) ωs= ω ts×60 |
|
11.減速度
假設直線加速。 否則,請按最大減速度計算。 |
直線運動 (負荷減速) αb= V l tb×60 旋轉運動 (原動機軸角速度) ω=2 π ×n1 旋轉運動 (原動機軸角減速) ωb= ω tb×60 |
|
12.加速時鏈張力:Fs |
直線運動Fs= M×αs 1000 +Fw 旋轉運動Fs= I l ×ωs×i 1000× d 2×1000 +Fw |
直線運動Fs= M×αs G +Fw 旋轉運動Fs= GD 2l /4×ωs×i d 2×1000 × G +Fw |
減速時鏈張力:Fb |
直線運動Fb= M×αb 1000 +Fw 旋轉運動Fb= I l ×ωb×i 1000× d 2×1000 +Fw |
直線運動Fb= M×αb G +Fw 旋轉運動Fb= GD 2l /4×ωb×i d 2×1000 × G +Fw |
13.校正kW (一般選擇時) |
修正kW=原動機額定kW×Ks (kW) | |
14.修正鏈張力 |
||
來自原動機的校正鏈條張力:F'm |
F'm = Fm × Ks × Kn × Kz (kN) {kgf} | |
根據啟動扭力修正後的鏈條張力:F'ms |
F'ms = Fms × K × Kn × Kz (kN) {kgf} | |
修正失速扭力所造成的鏈條張力:F'mb |
F'mb = Fmb × K × Kn × Kz (kN) {kgf} | |
托架驅動補償鏈張力:F'c |
F'c = Fc × Ks × Kn × Kz (kN) {kgf} | |
加速過程中修正後的鏈條張力:F 的 |
F's = Fs × Kn × Kz (kN) {kgf} | |
減速期間修正後的鏈條張力:F'b |
F'b = Fb × Kn × Kz (kN) {kgf} | |
負載修正後的鏈條張力:F'w |
F'w = M × Ks × Kn × Kz × G 1000 (kN) |
F′w=W (或Fw) ×Ks×Kn×Kz (kgf) |
|
質量M{重量W}不明時,根據發動機的額定扭矩Tn求軸扭矩T=Tn×i (kN・m) {kgf・m},用F=2T/d代替 |
||
15.慣性比:R |
R = Iℓ Im |
R = GD2ℓ GD2m |
16.慣性矩 (I) 和飛輪效應 (GD 2) 的換算 |
1kg・m2...(I) | 4kgf・m2...(GD2) |
上述計算公式中的鏈張力均為單鏈使用時的張力。
使用2根以上鏈條時,乘以不平衡負荷係數Ku (表4),計算每根鏈條的張力。
不平衡負載係數Ku
懸掛用、臺車驅動等用2根或4根鏈條懸掛、臺車牽引時,鏈條的作用張力不均勻。
作為左右不平衡的標準,乘以下述不平衡負荷係數Ku,求出每根鏈條的作用張力時使用。
(例)4根懸掛時每根的不平衡負荷係數
Ku = 0.6 × 0.6 = 0.36
| 2根 | 0.6 |
|---|---|
| 4根 | 0.36 |
