技術資料高速升降機Zip Master選擇
討論時的註意事項
1.關於加減速時間
- - 由於Zip Master提升速度很快,因此需要變頻器控制,並且必須提供足夠的加減速時間。
突然加速或停止可能會導致停止精度下降或工件振動。
如果Zip Master在啟動和停止時因安裝表面、臂剛性或負載條件而振動,請延長其加速/減速時間。
另外,如果您想減少振動量,可以考慮固定Zip Master的頂部。 - ・ Zip Master速度為最高速度。計算提升時間時,請將加速和減速時間都計算在內。
- ·需要縮短升降時間、高頻率運行、多點定位、連動運行等時,推薦配備伺服電機。
可對應您所需的伺服馬達制造商,敬請咨詢。
2.變頻器控制
- - 下降時會產生較大的再生電流,因此請根據您的使用條件提供足夠容量的變頻器再生電阻。
請向變頻器製造商諮詢再生電阻器的容量。 - ・我們建議使用容量比馬達大一號的變頻器。
- - 建立一個序列,當變頻器跳閘時啟動煞車。
3.關於防止跌落
- ・ Zip Master採用的是帶有非勵磁式煞車的馬達。如果您自行提供伺服電機,請使用附煞車的鍵槽軸規格。
此外,請您自行準備防墜落裝置以備不時之需。我們也可以客製化生產防墜落銷軸。
4.關於伺服電機控制
- ·下降時會產生較大的再生電流,因此請根據使用條件設置足夠的再生電阻器容量。
關於再生電阻器的容量,請與伺服電機制造商協商。 - ·即使在緊急情況下停止,也請勿使用電機內置的機械制動器進行制動。
請務必採用動態制動器減速後機械制動器動作的控制邏輯。詳細情況請參照電機制造商的使用說明。
關於選擇
選擇程序
- 1. 檢查機器、使用方法和環境是否適合Zip Master。
- 2.從規格一覽表 (此處) 中選擇具有滿足升降負荷的額定負荷的型號。
※超過額定負荷的升降負荷時,請考慮多次連動運行。
復數連動運行的選擇、控制方法請與我們協商。另外,高負荷規格也作為特型應對,請咨詢。 - 3.確認升降速度是否滿足選擇型號的速度。
※可對應提升升降速度之規格,敬請咨詢。 - 4.檢查所需的筆劃。
※行程超過2m時為特殊形狀,敬請咨詢。 - 5.驗證所選型號的可接受的過載是否滿足:。
檢查可接受的過載 (OHL)
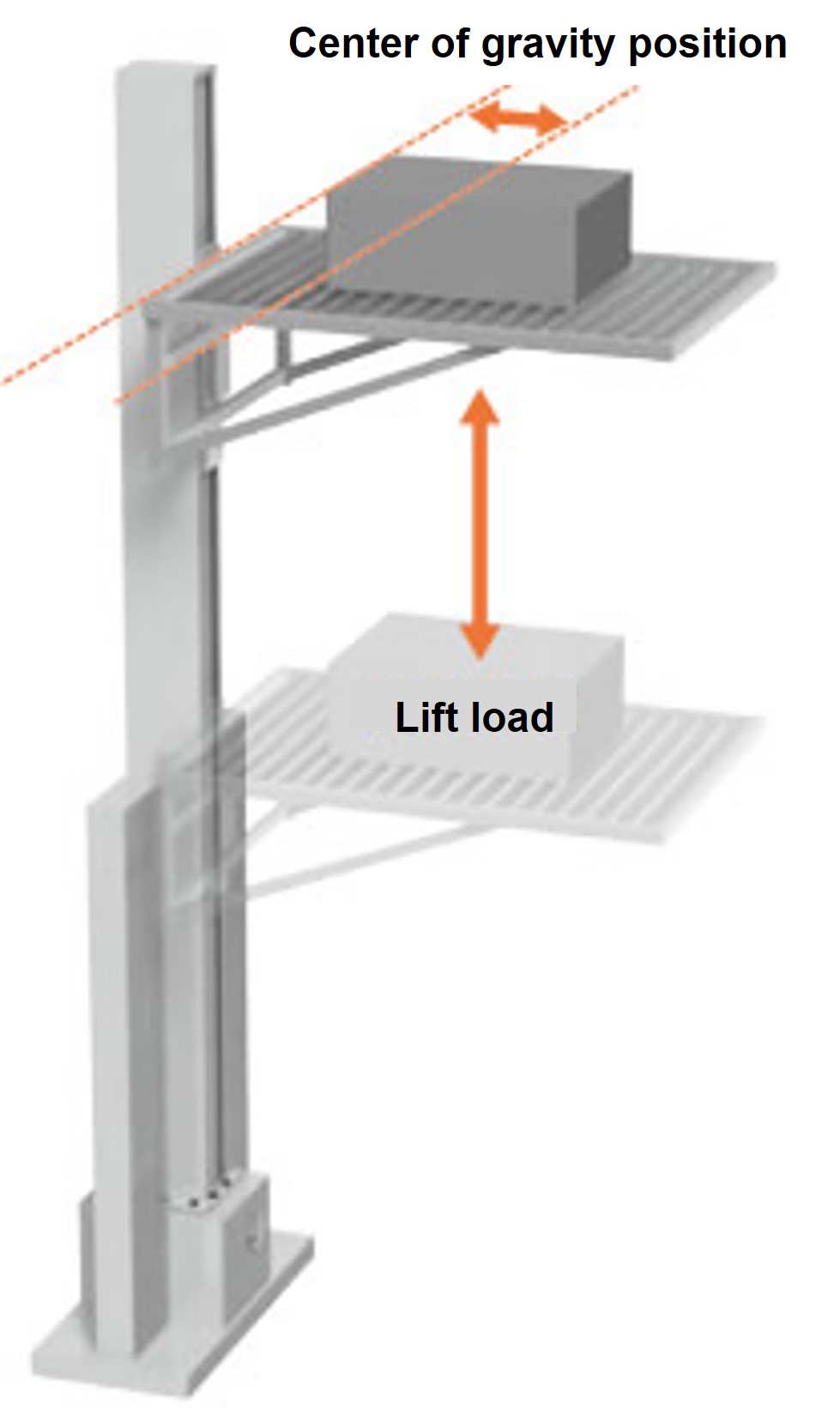
您可以透過查看起吊負載和重心位置輕鬆選擇合適的Zip Master。如右圖所示,起吊載重與重心位置的交點即為允許的懸伸載重值。
請參閱各型號的懸載負荷曲線 (此處) 。
註意:
- 當對臂施加負載時,Zip Master會沿著負載方向發生形變,因此必須預先考慮到臂尖會低於水平位置。形變程度不僅隨Zip Master行程長度的增加而增加,也會影響手臂的剛度和安裝面。
- - 如果你想減少啟動和停止時的失真或振動,可以考慮固定Zip Master的頂部。
- - 有關Zip Master失真程度的詳細信息,請另行與我們聯繫。
ZMEL1000M
(工件安裝面基準:參照外形圖)
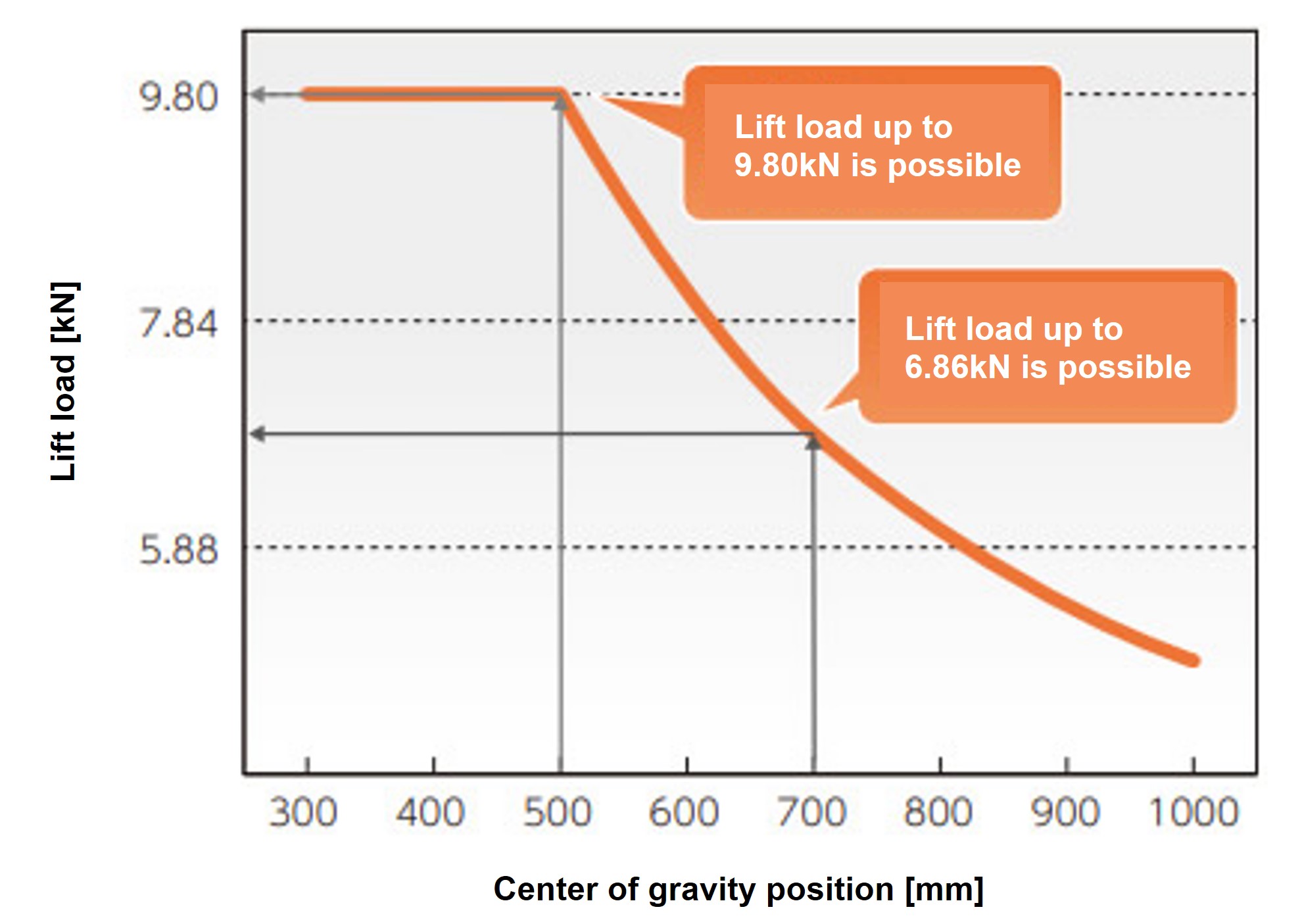
對於ZMEL1000M:
例1重心位置為500mm時,可升降至9.80kN的負荷。
例2重心位置為700mm時,可升降至6.86kN的負荷。
